Presented by Lowell Christensen
Magnetics Conference 2011
March 1 & 2 2011 San Antonio Texas
Motors have been around for many years and are a major usage of the energy from the power grid. Over history the generation of power has been fairly cheap and abundant so that the efficiency of motors was not a major issue. In the late years the cost of energy has been increasing due to rises in the cost of petroleum products that are used to make a large portion of the electricity used. Also people have started to realize that the amount of natural resources needed to produce energy is decreasing. These two factors along with several political factors have brought about a requirement that the production and usage of energy become more efficient. This movement to generate more efficient energy and to use power more efficiently has been called a green movement. This paper will discuss the efficiency improvements of permanent magnet servo motors to replace AC motors in servo applications and the energy savings that can be achieved by designing motors to meet applications and eliminating geared servo motor systems by using direct drive motors.
Geared motors were required because the early AC induction and synchronous motors ran at basically one speed. In order to get the speed the load required the motor had to be geared to the load to effectively reduce the speed. This gear reduction was mainly done by either gearing or belt driven methods. The AC motor drive systems in early times were just running directly off the power grid with no added controls. This meant that the only control over the system was using added clutches and brakes. This also meant the only way to control the system outputs was to run the motor at high energy levels and reduce the output by control valves and baffles. This type of system control was very wasteful in energy efficiency and had high system losses. Another negative effect of this type of system was that these systems had a high amount of backlash and overcoming the backlash also caused a additional waste of energy.
The early motor systems used AC induction and synchronous motors. These motors also led to a variation called a universal motor. Speed control was improved with the universal motor in that the speed could be changed with a change in voltage levels or a change in current to one of the windings. This was a big efficiency improvement because the speed could be changed directly instead of changes by letting a belt slip. This motor either could operate off the power grid directly or operate on a DC voltage input to be able to control speed. These motors use a winding on the stator and have either a squirrel cage rotor or a rotor wound on laminations. The efficiency of these motors has been improved over the years but still do not match the efficiency of the permanent magnet motors since one of the windings is needed to set up a field and the other winding to set up the power.
Servo motor applications are applications that need either intermittent operation of the motor or speed variations of the motor to control and hold the position of the output of the system. The AC motors are typically a single speed type motors controlled by the frequency of the input voltage. This would mean that the drive will have to change the frequency of the wave shape to control speed. Another feature of the AC motor is that it will have zero torque at the zero speed condition. This also is not convenient in servo systems since added power will be needed to operate a brake to hold a position. Adding permanent magnets to the field of the motor will provide a field at zero speed conditions and give a constant field value at all speeds and positions. This allows a servo system control to easily maintain the motor torque to keep the system output under control at all times.
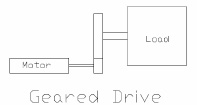
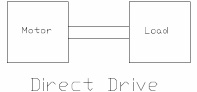
Permanent magnet servo motors can come in various types and configurations. The two most common types are DC brush motors and AC brushless motors. The advantage of the brush style motor is that it can be controlled by the level of a DC single phase voltage. This will make the cost of the Drive low. The AC brushless motor is a three phase motor so the drive is more complicated and requires more output stages. This tends to increase the drive cost due to more power output stages but the overall cost has come down due to programmable chips to control the drive. These Servo motors can be connected to the load in many ways such as belts or gears. The most efficient way to connect these motors to a load is to direct couple the motors to the load. This eliminates all the losses associated with the gearing and extra bearing systems needed for gearing. This can either be done by using a coupling in the motor and load shaft or building the motor into the load to one set of bearings and one shaft. The disadvantage of a direct coupled motor is that the motor will be larger in size and cost. The cost will be offset by eliminating the gearing system. The advantage of the direct coupled motor is that it will run at a lower speed which greatly reduces the speed dependent losses and improves efficiency. Another advantage of the direct drive system is that there is no backlash in the system. This will also have an indirect result in lowering the losses of the system and improving system efficiency.
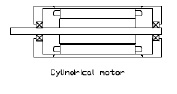
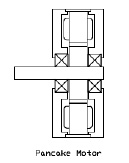
 There are several types of motors that can be used in direct drive applications. The most efficient would be the brushless motor. This motor typically would have the wound stator on the outside of the motor and would give the best cooling ability. One disadvantage of direct drive motors is that the motor will be larger in size since the motor does not have the gearing effect of increasing the output torque. The use of high energy Neodymium based magnets will reduce the size of the motor. The use of the high energy magnets will also reduce the copper needed and reduce the energy consumed in the motor. There are three basic styles of the permanent magnet brushless motor. The most common is the cylindrical type of motor. This motor would have a long length as compared to the diameter. Another type is the pancake style motor. This motor will have a short length and a large diameter. The third type is a special design that would have the magnets in the housing similar to brush style permanent magnet motors but have the shaft stationary and the outer shell rotating. There are several types of applications that will use this style motor such as long cylinders used in conveyer systems or a large diameter needed in large inertia loads such as fans and pumps.
There are several types of motors that can be used in direct drive applications. The most efficient would be the brushless motor. This motor typically would have the wound stator on the outside of the motor and would give the best cooling ability. One disadvantage of direct drive motors is that the motor will be larger in size since the motor does not have the gearing effect of increasing the output torque. The use of high energy Neodymium based magnets will reduce the size of the motor. The use of the high energy magnets will also reduce the copper needed and reduce the energy consumed in the motor. There are three basic styles of the permanent magnet brushless motor. The most common is the cylindrical type of motor. This motor would have a long length as compared to the diameter. Another type is the pancake style motor. This motor will have a short length and a large diameter. The third type is a special design that would have the magnets in the housing similar to brush style permanent magnet motors but have the shaft stationary and the outer shell rotating. There are several types of applications that will use this style motor such as long cylinders used in conveyer systems or a large diameter needed in large inertia loads such as fans and pumps.
The best motor for the most general types of direct drive motors would be the pancake permanent magnet brushless motor design. A direct drive motor will in general have a low speed requirement. This would be due to the elimination of the gearing that is used in a lot of present servo applications. The low speed will reduce the speed dependent losses making the motor more efficient due to the reduction in rotational losses. Speed dependent losses are mainly a function of the speed squared with some of the magnetic losses a function of the speed to higher. Reducing the speed will have a positive effect on reducing the motor losses even though the motor is a larger size. Another positive effect in reducing energy losses is that the lower speed will allow more motor magnetic poles. This will reduce both the resistive and inductive losses of the motor. The high pole count will reduce the length of the wire end turns and this will result in lower heat losses in the motor. The lower inductance will allow the current into the motor faster and allow all of the current supplied to the motor to produce torque. The lower inductance used to be considered a problem in controlling motors but with present drive schemes using programmable controllers, this is not a large problem. The other types would be used in more specialized types of applications. The motor requirements would be specific to the applications and the most efficient motor would probably be a motor that is designed to meet the specific application. The geared solutions would have had a specially designed gear ratio to meet the application.
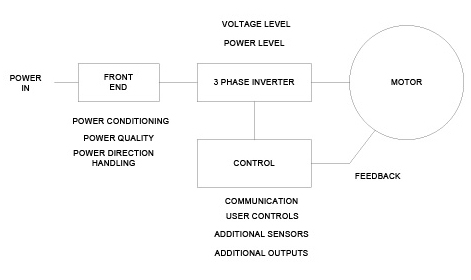
The motor efficiency is only a part of the total system efficiency. The drive that is supplying power to the servo motor also has a large effect on the overall system efficiency. The motor efficiency curve is a bell shaped curve and the best motor efficiency is achieved at the speed related to the top of the bell curve. If the motor needs to run through a range of speeds, the range needs to be set up to achieve the maximum efficiency for the whole speed range. Another way to achieve this is for the drive to modify the input voltage so that he motor will be in a maximum efficiency for the whole speed range. Another issue to address is the power factor of the motor. This also can affect the efficiency and should be addressed in input power conditioning.
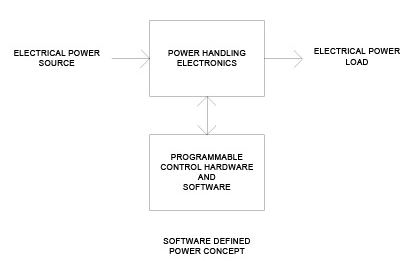
The power delivered to the motor can be conditioned and controlled by using drives that are programmable and controlled by software. Gary Box at Gbox LLC has trademarked a term called Software Defined Power. This is a methodology of using software in a PLC to control and condition the power delivered to a motor. This will efficiently convert a voltage, current, or waveform to another voltage, current or waveform to supply efficient power to a motor to make the motor run at its most efficient level. Since this is software controlled, the changes to the input power source can be done dynamically using feedback from a feedback device on the motor.
This concept of software defined power will help a lot in enabling the use of alternate power system such as wind power generation and solar panel power generation. These types of power generation will have a varying input voltage and will need voltage conditioning to work efficiently. Usually the power storage for the input will be in batteries but a Software Defined Power system will be able to operate on either the power source directly, a battery storage system or on the power grid directly. These three types of input power will vary greatly in the type of power input but the software can be programmed to switch between the types of sources dynamically and will be able to operate in remote locations with out being constantly monitored to switch inputs when conditions require input changes. The elimination of the gearing in direct drive systems will also eliminate most of the maintenance requirements in remote locations making the operation of the system more reliable and worry free. The added efficiency of the Software Defined Power system will also allow a smaller motor to be used in the divest drive application which also will improve efficiency.
We can investigate a typical servo application to check the feasibility of a direct drive system to replace a geared system. We assume an application that the load requires 10 N-M of torque at a speed of 500 RPM. If we use a motor capable of 0.5 N-M and a speed of 10000 rpm we would need a gear ratio of 20:1. This calculation does not take into consideration of the efficiency of the gear box and motor. If we assume the gearing assembly has an efficiency rating of 75% then the motor would need to produce a torque of 0.67 N-m. Now if we assume that the motor is 90 % efficient at the speed required for the load than we will need more torque to overcome this and the torque the motor will need to produce will increase to 0.75 N-m. Now if we look at the speed requirements, the motor no load speed will need to be about 1/3d higher than the operation speed and this will cause the motor voltage and torque constant to be lower to archive the speed required unless t he buss voltage is high enough to reach the speed with enough headroom to overcome the back EMF and voltage drop of the motor. All of this will end up making the motor torque requirement for a motor that is 50% to 100% larger than the requirement of the load. Another factor is the rotational losses of the system. Using the geared system the losses will be much higher than just the losses for the motor. The larger motor at the lower speed will have about half of the losses of the smaller motor at the higher speed. Adding in the gearing speed dependent losses would at least double the losses of the motor. This would make the losses about a half a N-M for the large motor and 2 N-M for the small motor which would need to be added to the torque supplied by the motor. These numbers are typical for the sizes of motors in the above example. If the motors were designed for the application these losses would be included in the efficiency calculations. If the motors were just picked from a catalogue the added losses would apply if the efficiency curve for the motor does not reach its peak value at 10000 rpm.
Motor efficiency is a bell shaped curve and the efficiency given for a motor is typically the value at the highest point of the curve. If a motor is picked out of a catalogue for the application it is very unlikely that the motor will be the most efficient at the speed required for the application. Another factor of picking a motor from a catalogue is that the motor picked will need to be larger than the motor needed for the application. The typical compromise will be a larger motor with a lower voltage constant to allow the motor to reach the desired speed. The lower voltage constant will result in a lower torque constant and require a higher current than a specially designed motor would require. This will result in wasted energy going into heat since the motor resistive losses are current squared times the resistance. The other effect of a catalogue motor will be size related. Larger motors will tend to have higher speed dependent losses so that the torque produced by the motor to meet the load requirement will be higher than needed and a less efficient motor. The cost of specialty designed motors will be higher than a catalogue motor but the long term savings will offset the higher initial cost. The trend toward green energy production and green energy consumption is a current goal of most of the world but will require a larger initial cost to implement.
Motors are one of the largest users of energy and have a very large potential to save a lot of energy usage through switching to higher efficiency motors. The switch to high efficiency motors has been a large part of the green movement. Just changing to highly efficient motors will not achieve all the energy savings that can be achieved. Servo motors are a class of motors that fit applications that the load can be controlled. This control of the load also adds the ability to control energy usage along with using green motors to make the whole application green. This means that the motor, the load, the method of coupling to the load and the drive controling the motor and load can all work together to make the whole system can be considered a green application from the inside out thru the whole system. This will achieve a lot higher energy savings than a system that is just painted green by using green components that are not matched well and do not maximize the energy savings. The use of a matched energy savings system will have a higher initial cost thru both design and components but will save money and conserve natural resources in the long term.